
") VL53L4CD TOF開發(fā)(1)----驅(qū)動TOF進行測距
VL53L4CD TOF開發(fā)(1)----驅(qū)動TOF進行測距
VL53L4CD適用于接近測量和短距離測量,可實現(xiàn)從僅僅1 mm到1300 mm的超精準距離測量。新....
e2studio開發(fā)三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態(tài)
本文將介紹實時獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計的參數(shù),以及通過輪....
e2studio開發(fā)三軸加速度計LIS2DW12(2)----基于中斷信號獲取加速度數(shù)據(jù)
本文將介紹實時獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計的參數(shù),以及通過輪....
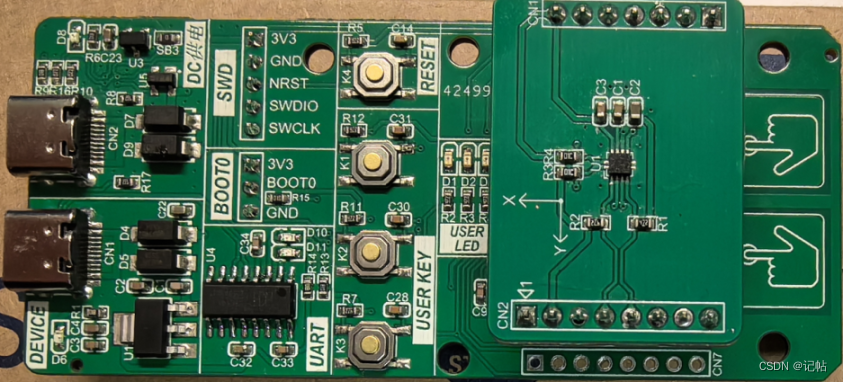
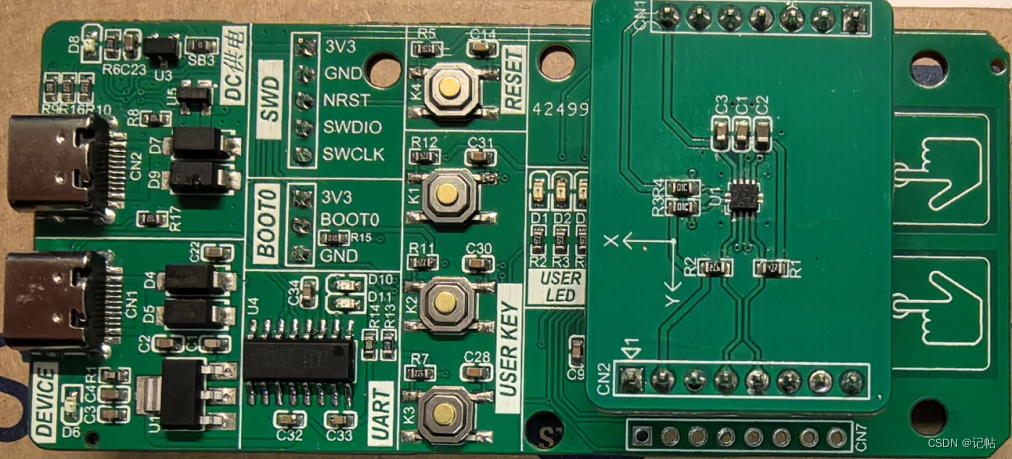
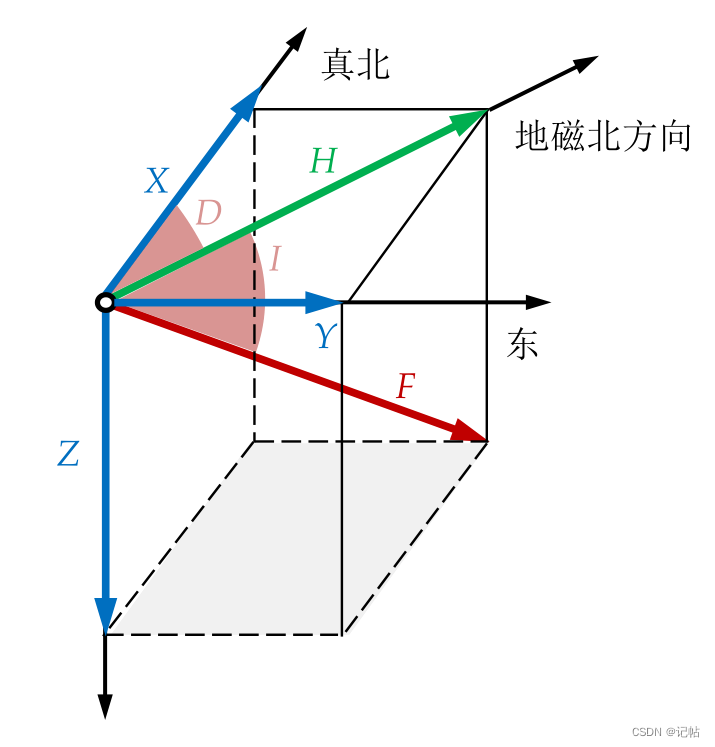
e2studio開發(fā)磁力計LIS2MDL(2)----電子羅盤
本文將介紹如何使用 LIS2MDL 傳感器來讀取數(shù)據(jù)來轉(zhuǎn)化為指南針。
地磁場強度范圍約為 23,0....
e2studio開發(fā)磁力計LIS2MDL(1)----輪詢獲取磁力計數(shù)據(jù)
本文將介紹如何使用 LIS2MDL 傳感器來讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗證設(shè)備ID、配....
e2studio開發(fā)三軸加速度計LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)
本文將介紹如何驅(qū)動和利用LIS2DW12傳感器,實現(xiàn)精確的運動感應(yīng)功能。
IS2DW12是一款高性....
陀螺儀LSM6DSV16X與AI集成(5)----6D方向檢測功能
陀螺儀通??梢宰x取三個方向上的旋轉(zhuǎn),即繞X軸、Y軸和Z軸的旋轉(zhuǎn)。每個方向上的旋轉(zhuǎn)包括正向旋轉(zhuǎn)和反向旋....
e2studio開發(fā)LPS28DFW氣壓計(2)----水壓檢測
本文將介紹如何使用 LPS28DFW 傳感器來讀取的壓強數(shù)據(jù),來估算水下深度,可以利用液體靜壓的原理....
e2studio開發(fā)LPS28DFW氣壓計(1)----輪詢獲取氣壓計數(shù)據(jù)
本文將介紹如何使用 LPS28DFW 傳感器來讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗證設(shè)備ID、....
e2studio開發(fā)STHS34PF80人體存在傳感器(1)----獲取人體存在狀態(tài)
STHS34PF80是一款高性能的紅外(IR)傳感器,特別適用于檢測存在感和運動。其主要特點是高靈敏....

VD6283TX環(huán)境光傳感器(2)----移植閃爍頻率代碼
光學(xué)閃爍是指人造光源產(chǎn)生的光的脈沖或波動現(xiàn)象。在低頻下,閃爍是肉眼可見的,即人眼能夠感知到光的閃動。....
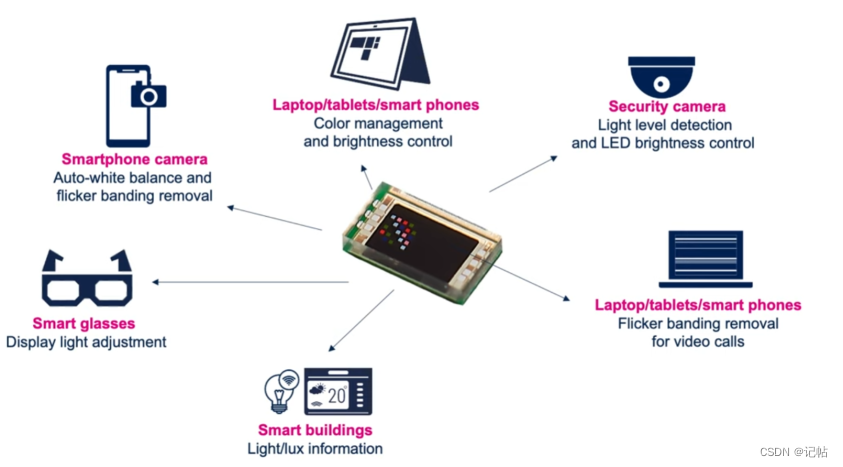
VD6283TX環(huán)境光傳感器(1)----獲取光強和色溫
為了充分利用VD6283TX傳感器的特性和功能,本章節(jié)重點介紹了如何捕獲光強度和相關(guān)色溫值。作為ST....

VL53L4CX TOF開發(fā)(1)----驅(qū)動TOF進行測距
VL53L4CX 是一款先進的激光距離傳感器,專為長距離和多目標測量設(shè)計,能夠在最長6米的范圍內(nèi)提供....
氣壓計LPS28DFW開發(fā)(1)----輪詢獲取氣壓計數(shù)據(jù)
本文將介紹如何使用 LPS28DFW 傳感器來讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗證設(shè)備ID、....
磁力計LIS2MDL開發(fā)(3)----九軸姿態(tài)解算
姿態(tài)有多種數(shù)學(xué)表示方式,常見的是四元數(shù),歐拉角,矩陣和軸角。他們各自有其自身的優(yōu)點,在不同的領(lǐng)域使用....

磁力計LIS2MDL開發(fā)(1)----輪詢獲取磁力計數(shù)據(jù)
本文將介紹如何使用 LIS2MDL 傳感器來讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗證設(shè)備ID、配....

陀螺儀LSM6DSV16X與AI集成(1)----輪詢獲取陀螺儀數(shù)據(jù)
本文將介紹如何使用 LSM6DSV16X 傳感器來讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗證設(shè)備I....
三軸加速度計LIS2DW12開發(fā)(3)----檢測活動和靜止狀態(tài)
檢測活動和靜止狀態(tài)主要用途是在嵌入式應(yīng)用中實時監(jiān)控加速度計的活動狀態(tài),例如在可穿戴設(shè)備、智能手機或安....
三軸加速度計LIS2DW12開發(fā)(2)----基于中斷信號獲取加速度數(shù)據(jù)
本文將介紹實時獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計的參數(shù),以及通過輪....
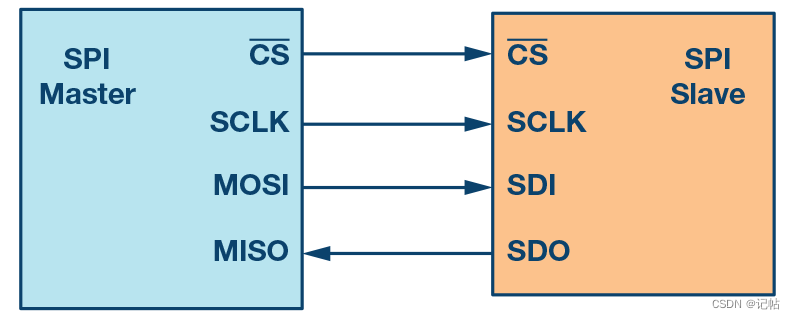
瑞薩e2studio(29)----SPI速率解析
在嵌入式系統(tǒng)的設(shè)計中,串行外設(shè)接口(SPI)的通信速率是一個關(guān)鍵參數(shù),它直接影響到系統(tǒng)的性能和穩(wěn)定性....
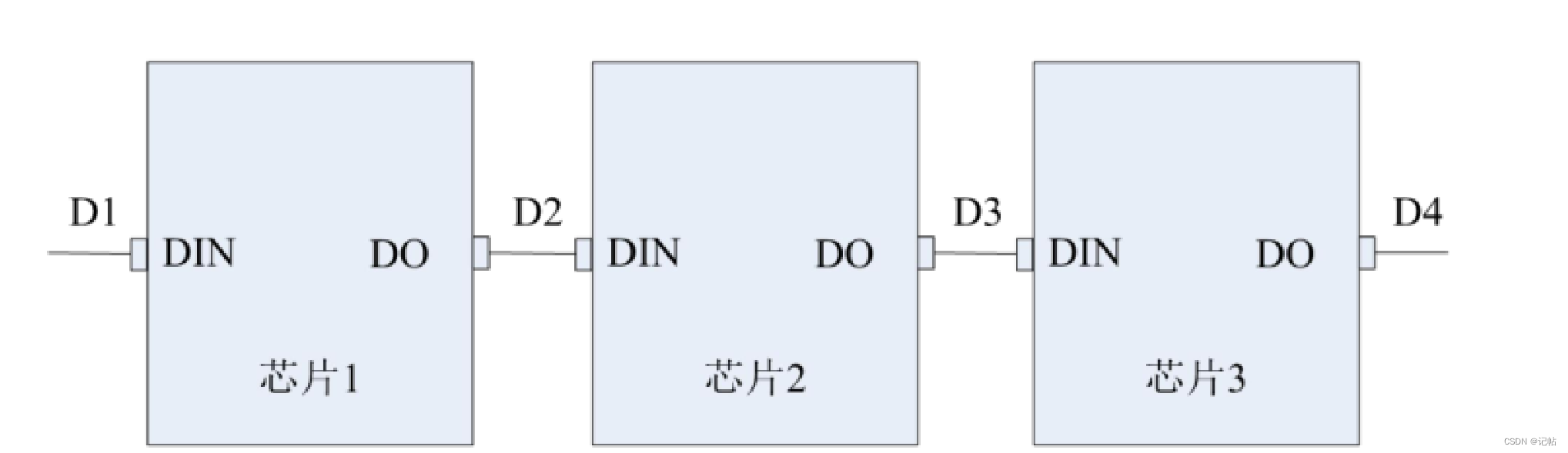
瑞薩e2studio(28)----SPI 驅(qū)動WS2812燈珠
本文介紹了如何使用瑞薩RA微控制器,結(jié)合E2STUDIO配置工具和SPI通訊接口,來驅(qū)動和控制WS2....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)